Sensor Msgs
Warning
This package is deprecated as of ROS 2 J-turtle (and ROS 2 Rolling). A drop-in replacement for the interface packages are provided by the Nao LoLA repository, please use that instead.
The package nao_sensor_msgs defines msgs used to store sensory information specific to the NAO robot.
Accelerometer
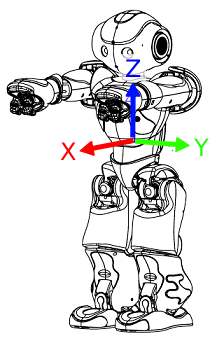
Units are in m/s 2
Note that gravity is measured by an accelerometer. When standing, the robot will measure 9.8 m/s 2 POSITIVE in the z-direction, since its receiving an acceleration upwards from the floor when compared to a freefall state.
float32 x # m/s/s
float32 y # m/s/s
float32 z # m/s/s
Angle
Units are in rad.
An absolute angle of the torso. Both x and y are zero when upright.
float32 x # rad
float32 y # rad
Battery
float32 charge # 0% - 100%
bool charging # True if robot is getting charged
float32 current # In Amperes, negative for discharge, positive for charge
float32 temperature # Celcius (°C)
FSR
float32 l_foot_front_left # kg
float32 l_foot_front_right # kg
float32 l_foot_back_left # kg
float32 l_foot_back_right # kg
float32 r_foot_front_left # kg
float32 r_foot_front_right # kg
float32 r_foot_back_left # kg
float32 r_foot_back_right # kg
Gyroscope
Units are in rad/s.
float32 x # rad/s
float32 y # rad/s
float32 z # rad/s
Joints
JointCurrents
Electrical current, reported from the current sensors in each motor joint of the NAO.
float32[25] currents # Amperes (A), in order of JointIndexes.msg
JointPositions
Joint positions of each motor joint.
# An array of joint positions, corresponding to their indexes in the JointIndexes.msg.
float32[25] positions # radians
JointStatuses
Temperature status enums, computed accordingly to the temperature limitation to protect the motors.
int32 STATUS_NORMAL=0 # normal
int32 STATUS_HOT=1 # high, start to reduce stiffness
int32 STATUS_VERY_HOT=2 # very hot, stiffness reduced over 30%
int32 STATUS_CRITICALLY_HOT=3 # critically hot, stiffness is set to 0
int32[25] statuses # Status codes, in order of JointIndexes.msg
JointStiffnesses
Joint stiffnesses in each motor joint.
# An array of joint stiffnesses, corresponding to their indexes in the JointIndexes.msg.
float32[25] stiffnesses # 0.0 - 1.0
JointTemperatures
Temperature reported for each motor joint in the NAO.
Tip
The motor temperature is a simulated one, using electric current value of the motor. The motor board implements a temperature limitation to protect the motor. The temperature limitation depends on robot version.
float32[25] temperatures # Celcius (°C), in order of JointIndexes.msg
RobotConfig
string body_id # eg."P0000073A07S94700012"
string body_version # eg. "6.0.0"
string head_id # eg. "P0000074A05S93M00061"
string head_version # eg. "6.0.0"
Sonar
Sonar distance measurements.
float32 left # m
float32 right # m
Touch
bool head_front # true if being touched
bool head_middle # true if being touched
bool head_rear # true if being touched